Hi !
IOT & ROBOT DESIGN
-
- NAME
- 陈俊霏
-
- blackbox114
-
- PHONE
- +86 133 4026 3414
-
- chen.junfei@nexuslink.cn
I build robots. I am a student from Chongqing University of Posts and Telecommunication, where I studied Math and Applied Mathematics. Before, I was the founding leader of Dome Military (A cool robotics club ). I studied Quadruped Robot in NMID Lab. Last year I was honored to join the open source maker team TaichiMacker, esponsible for IoT and ROS development in the team. Coursework includes: Modeling and Control, Artificial Intelligence, Linear Algebra, Probability and Statistics, Differential Equations, Discrete Math, Computational Modeling
重慶郵電大学理科院の応用数学科での3年生で、数学と統計学を専攻しています。 同時に、通信と情報学院のモバイルインターネット研究センター(NMID)で組み込みハード開発(第一学年)とロボット開発(第二、第三学年)を勉強しています。期間に、ロボット開発チーム「穹頂軍工」を成立し、今は多足ロボットとそのサポート設備を開発しています。2019年に開源創客チーム「太極創客」に参加し、物事のインタネット(IOT)とROSロボットの開発することを担当するとともに、一部の教程の作成することを责任を负います。マスターコース:モデリングと制御、人工知能、高等代数、確率論、微分方程式、数学分析、計算モデリング
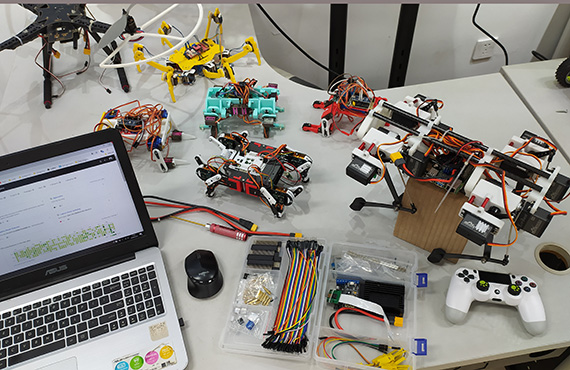
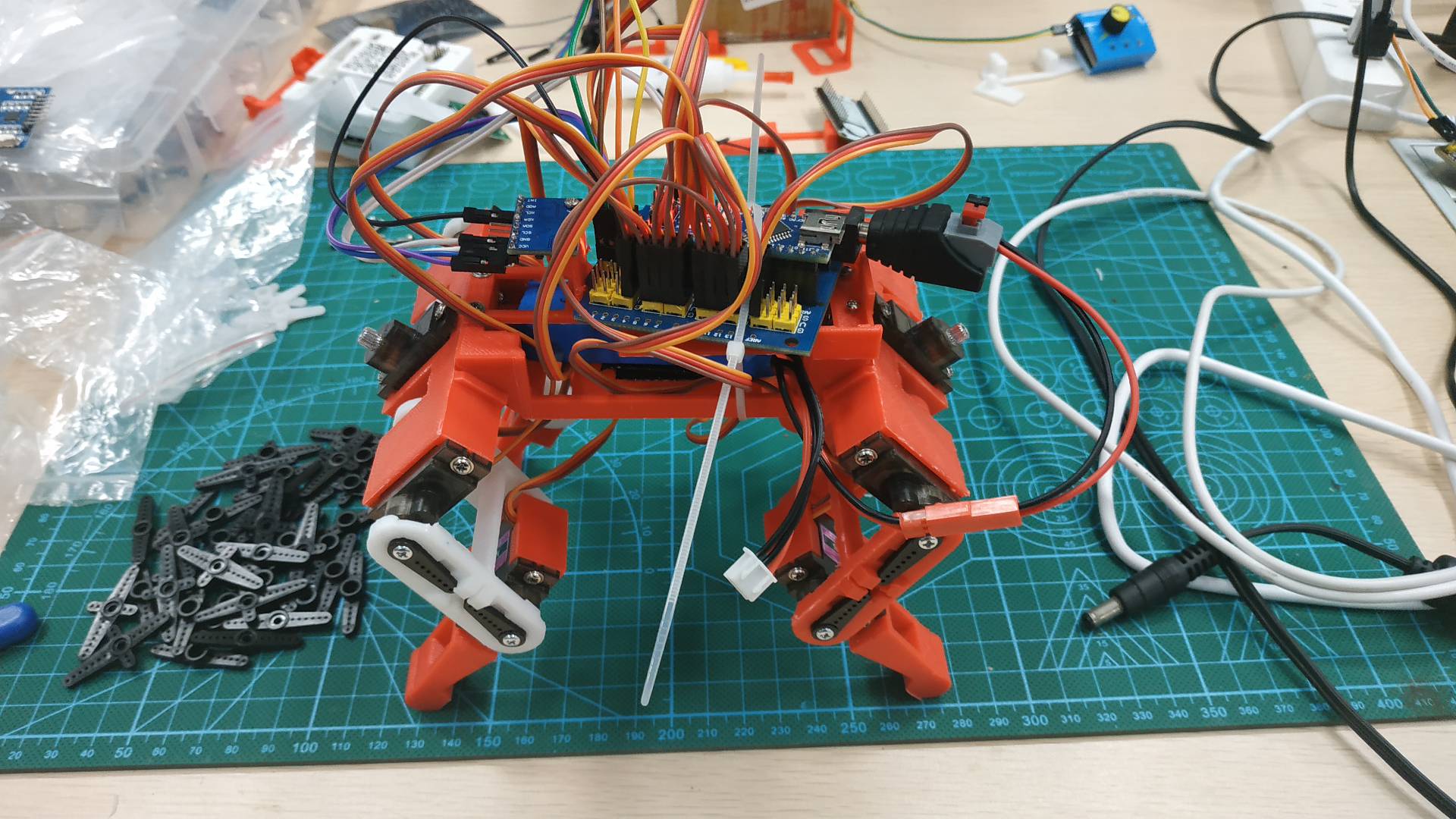
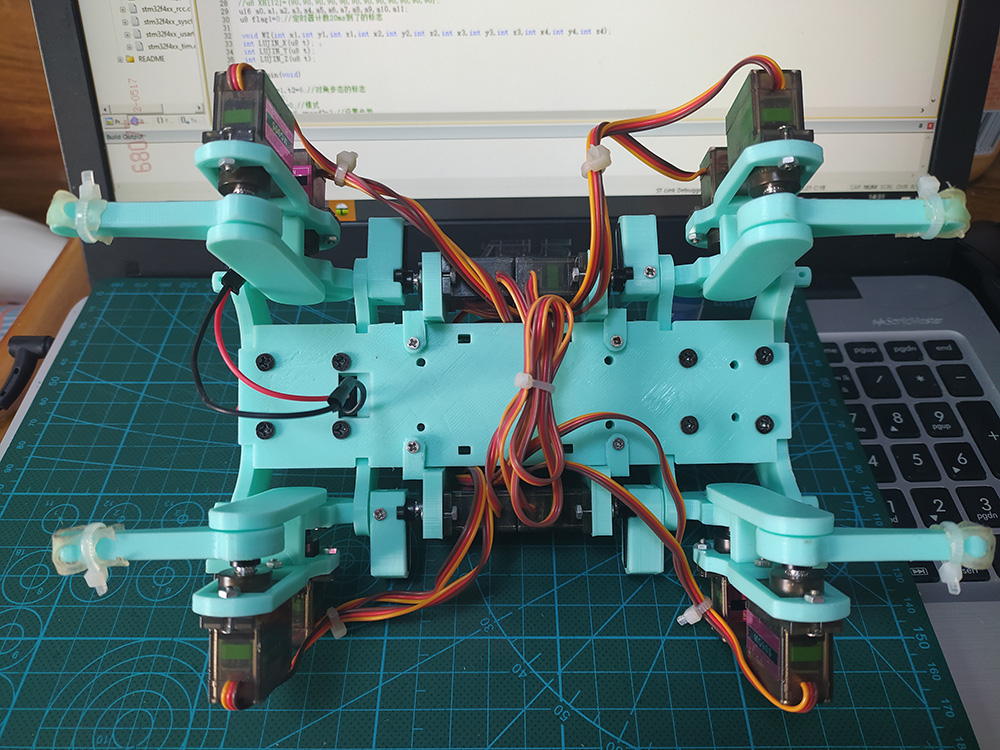
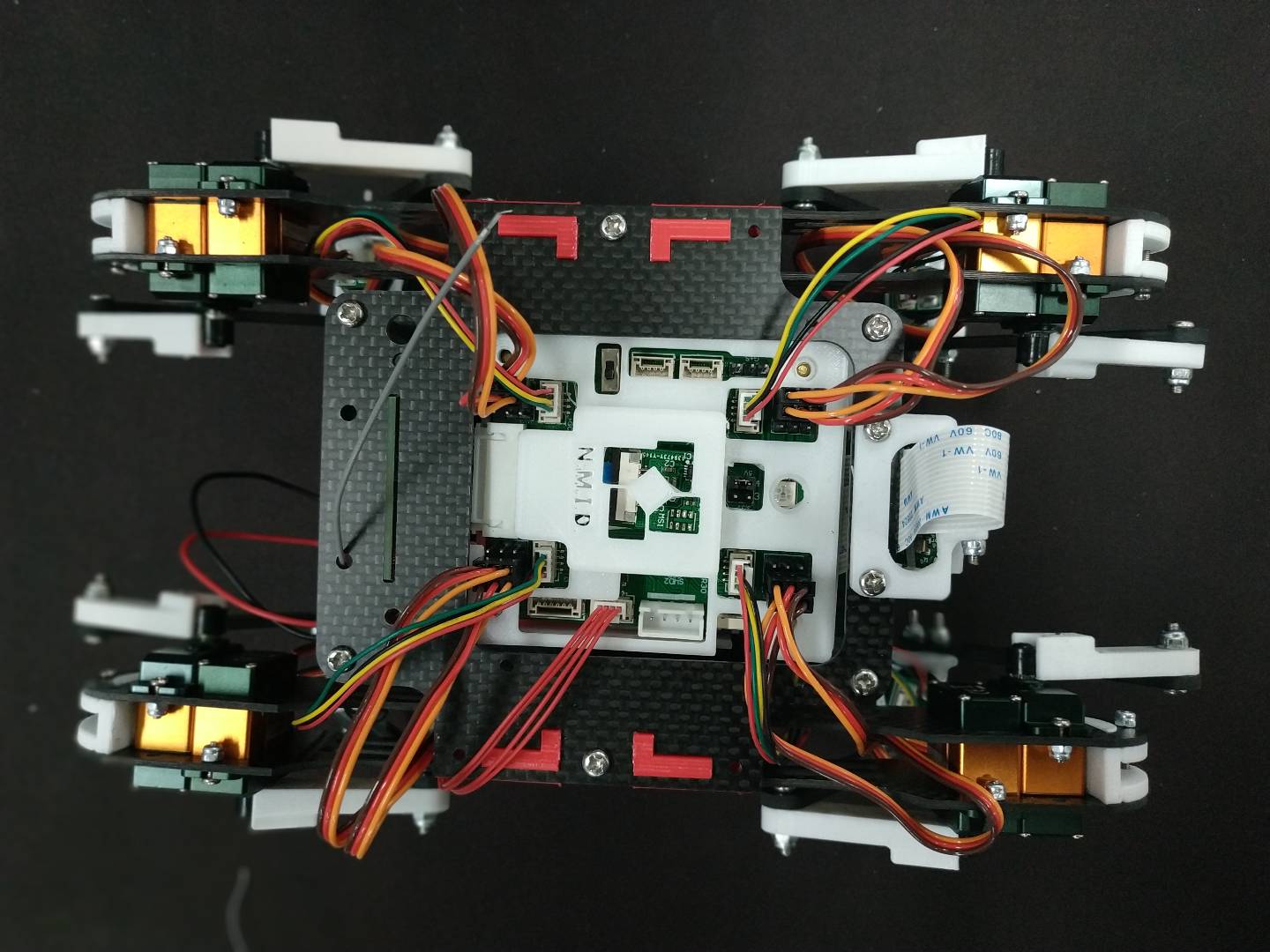
开发麦克纳姆轮机器人和伺服机器人。目前主要开发的是足式机器人,拥有四足,能在各种复杂地形上行动,具有自主导航和简单的建图能力,并能搭载一定重量的载荷
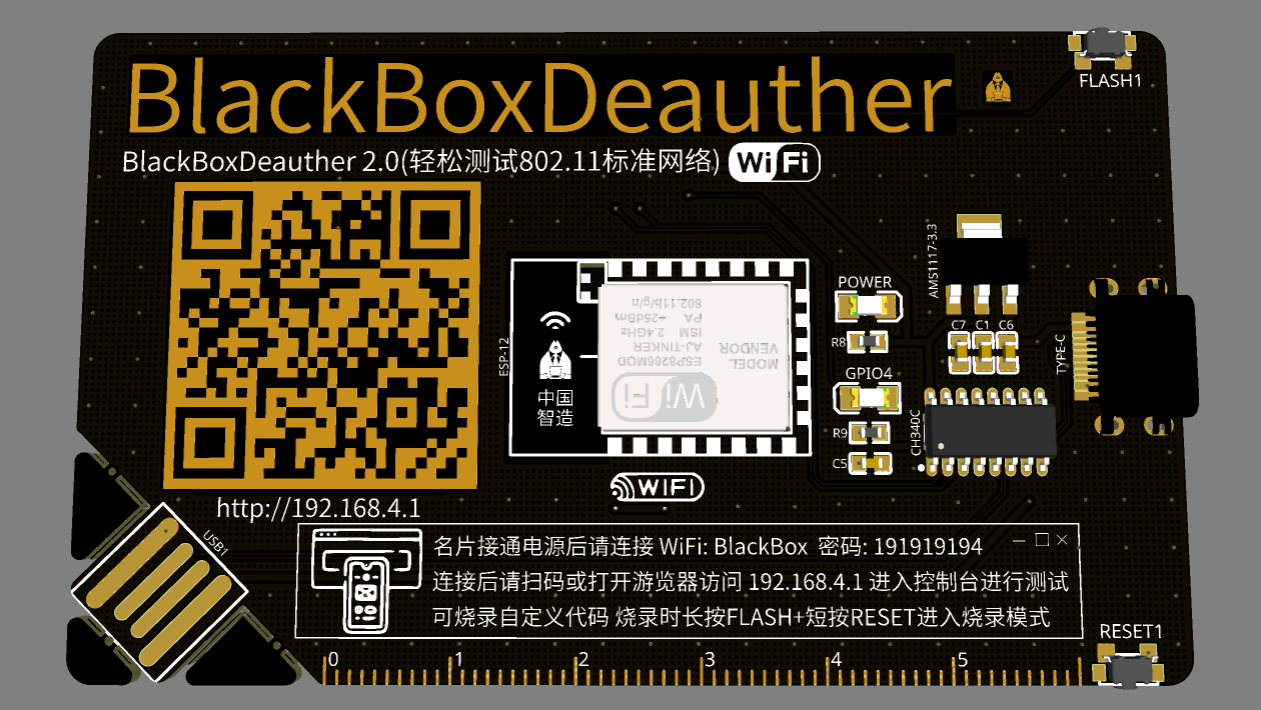
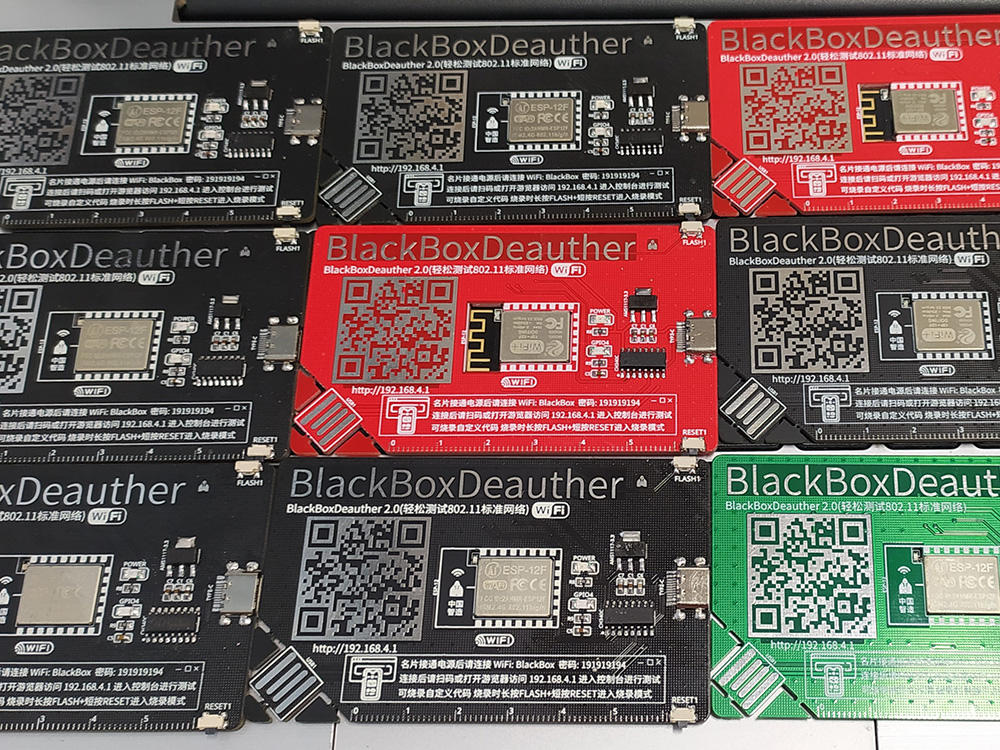
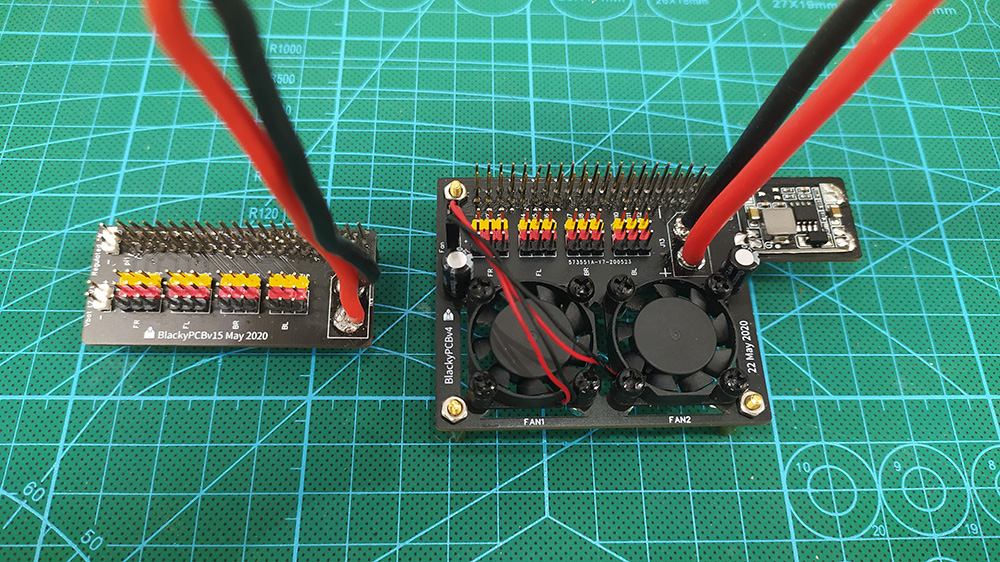
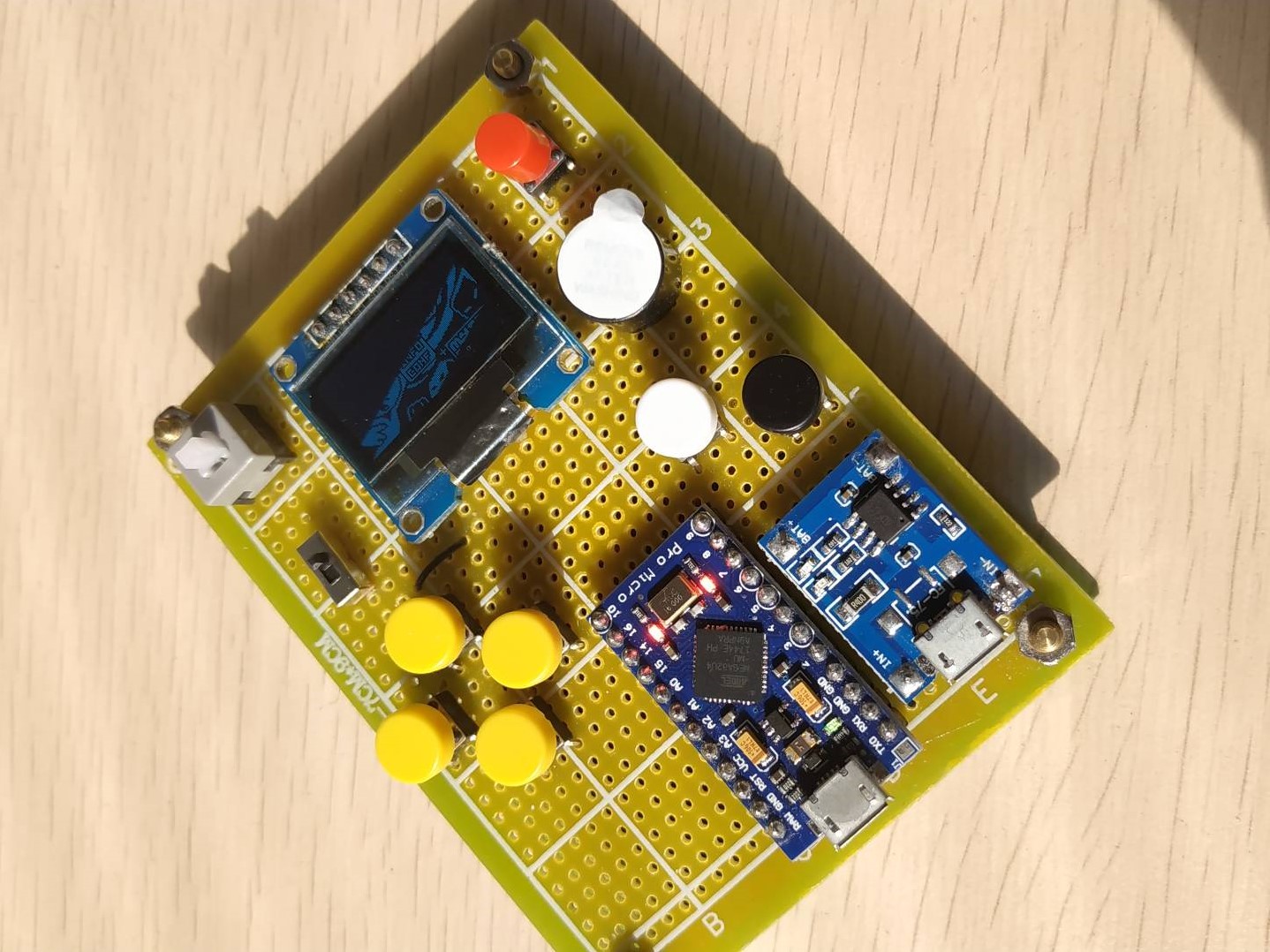
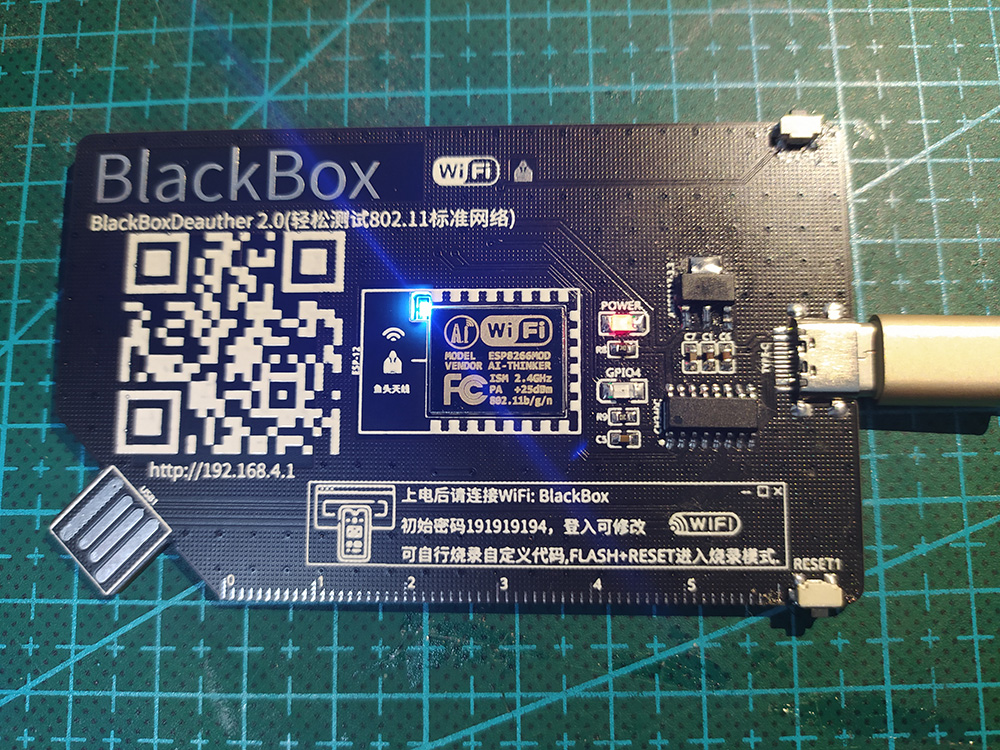
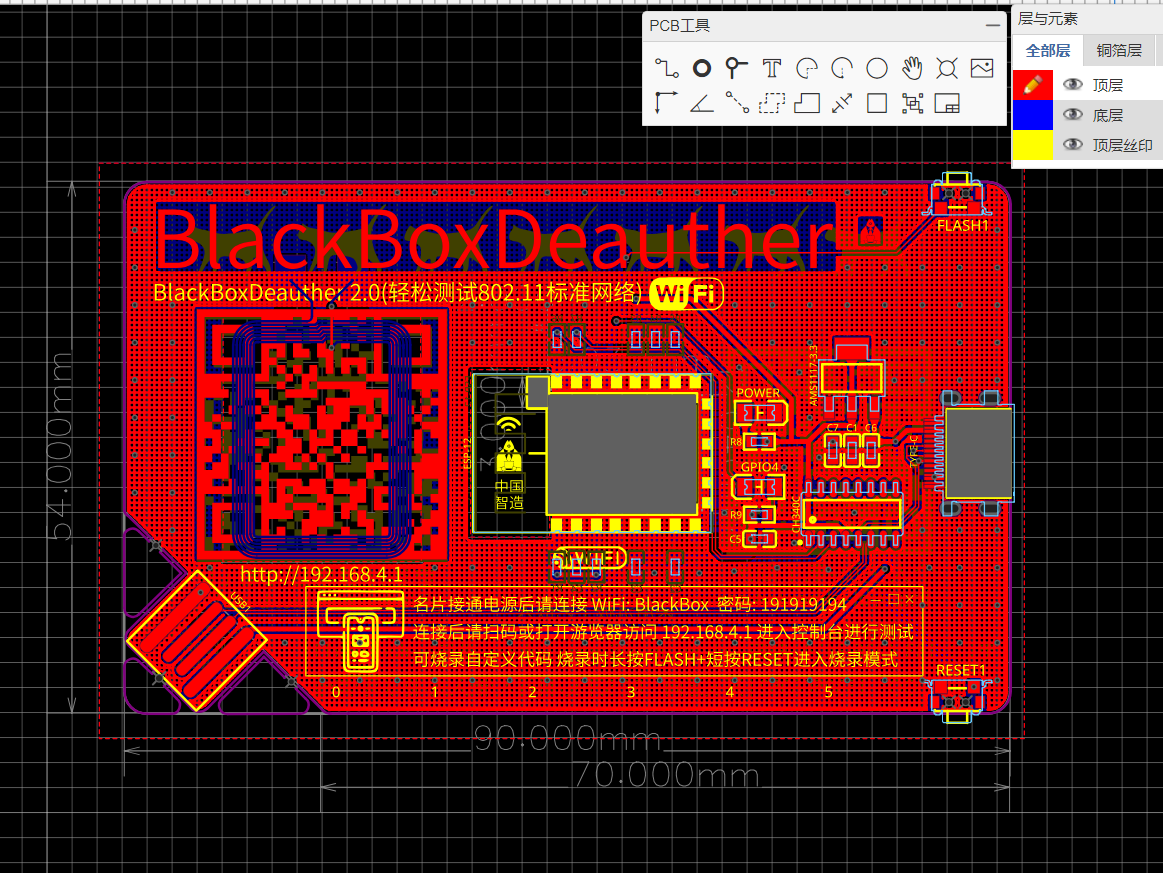
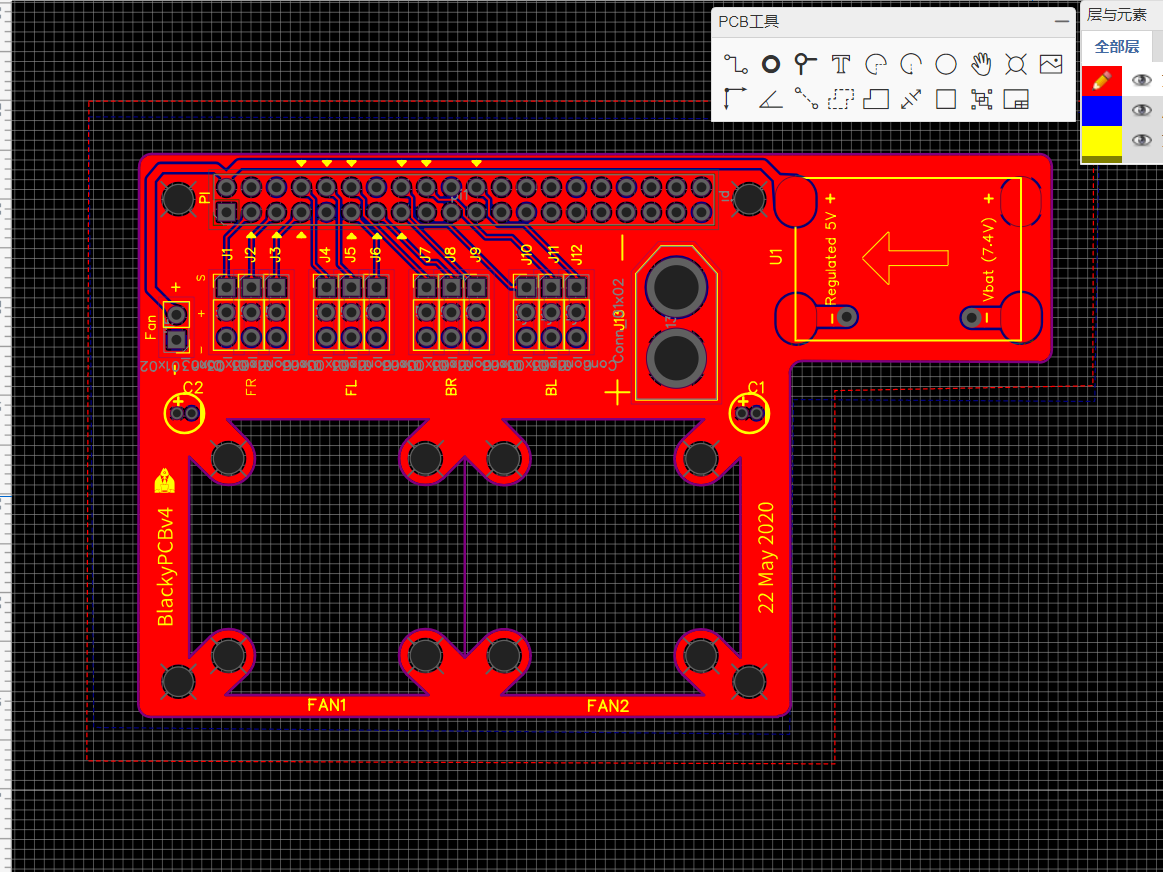
依托立创EDA(easyEDA)进行PCB设计。主要为机器人设计多功能拓展板,电源板,或为物联网系统设计小体积基板和定制拓展板等。
基于环保理念的物联网开发.比如开发一套从室内空气质量监测到室内空气净化,一整套由硬件、服务器、客户端组成的系统,采用可降解材料制造硬件基板,并写入低功耗休眠模式降低耗能
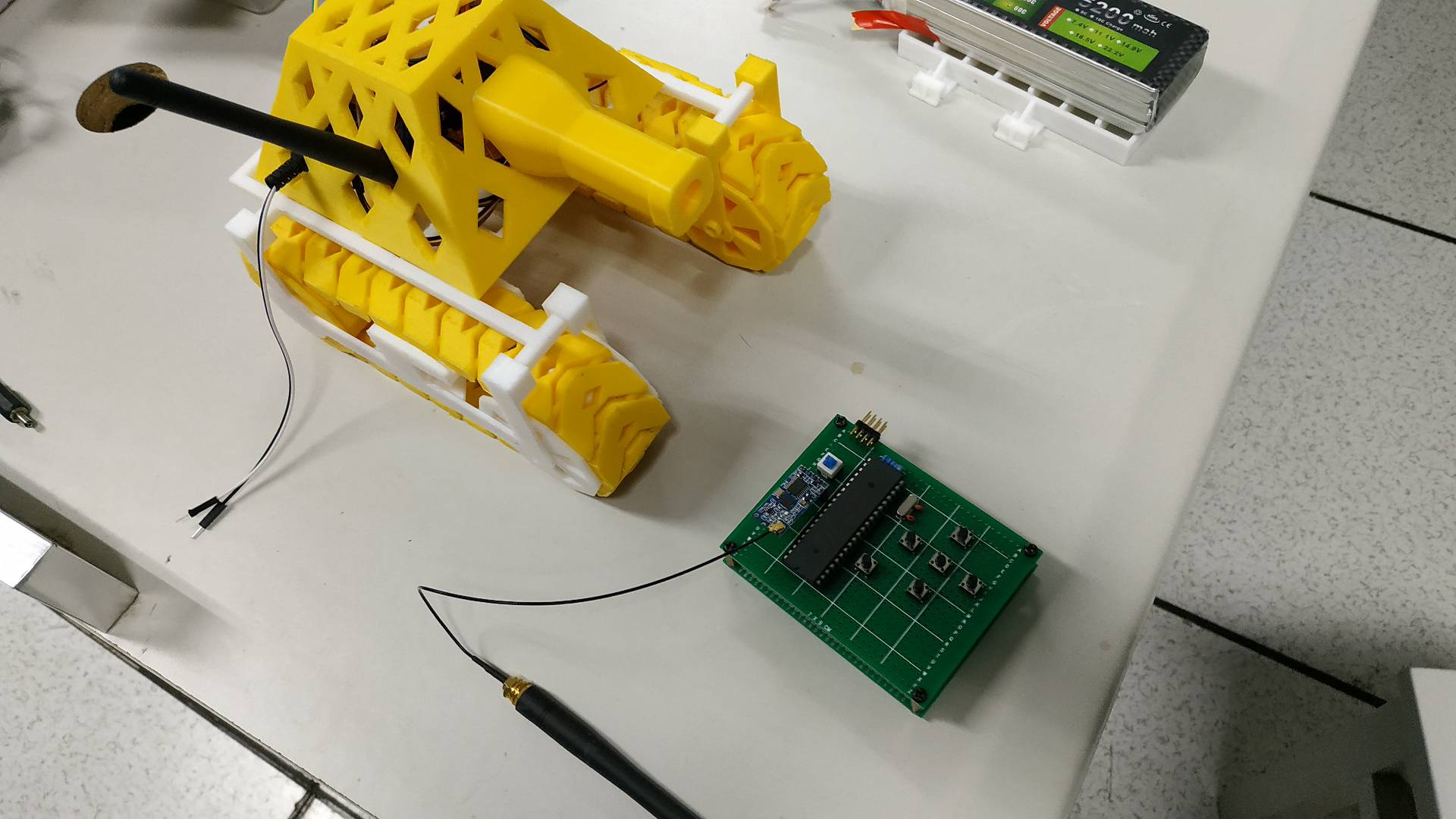
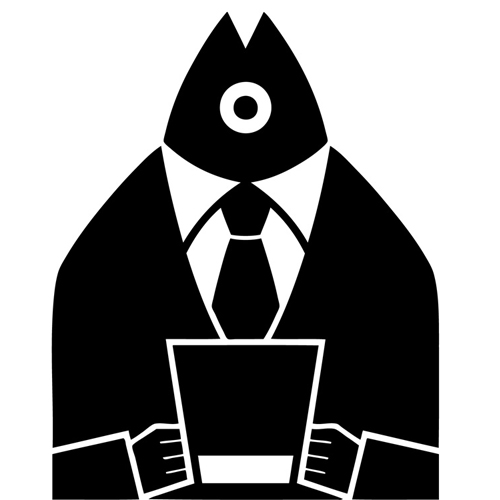
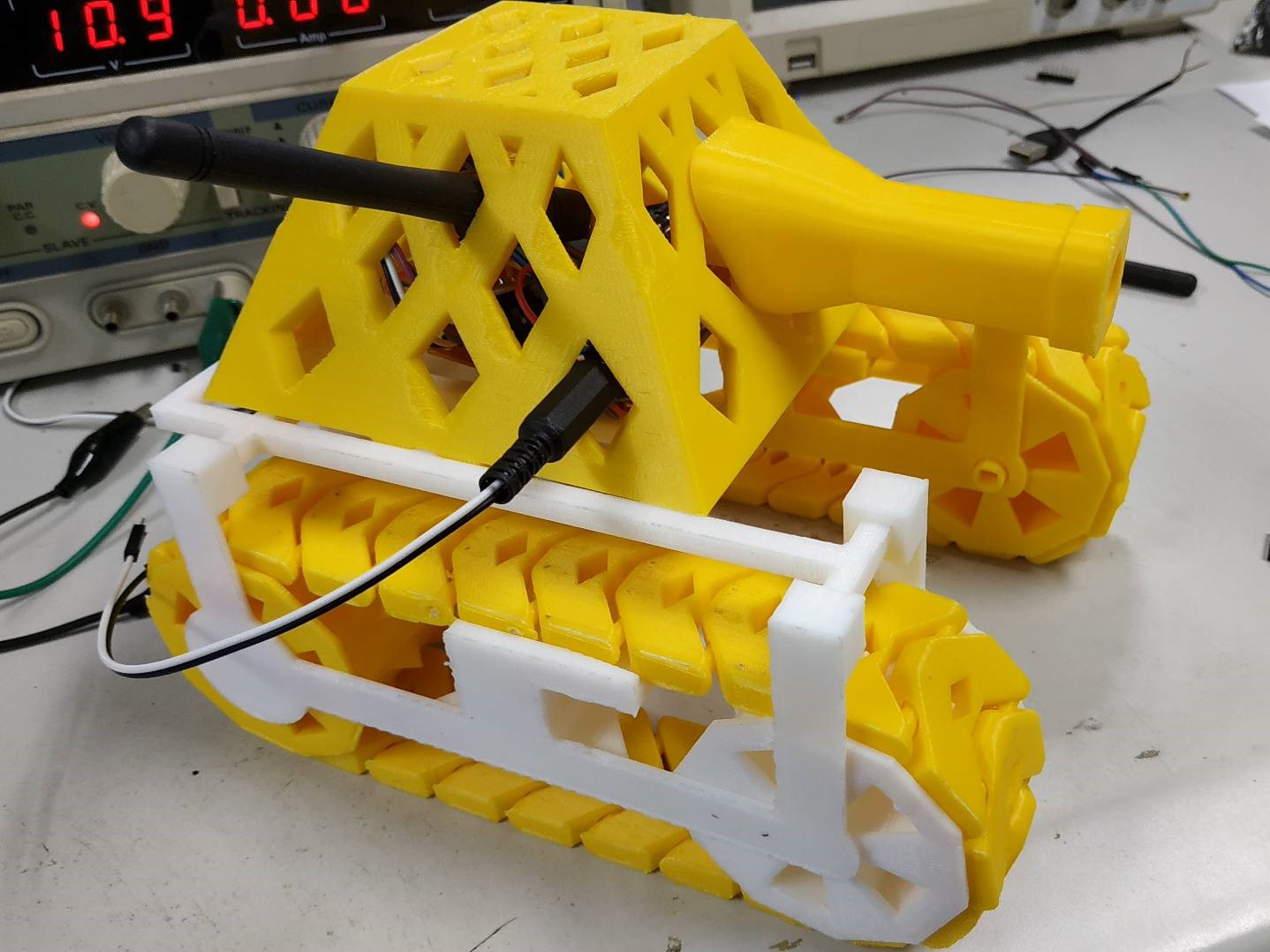
使用SolidWorks进行3D建模开发,主要为机器人设计承重和结构件,定制适合机器人的各种外设(如机械臂,云台,激光器托架等)。 为自己的机器人开发主要骨骼

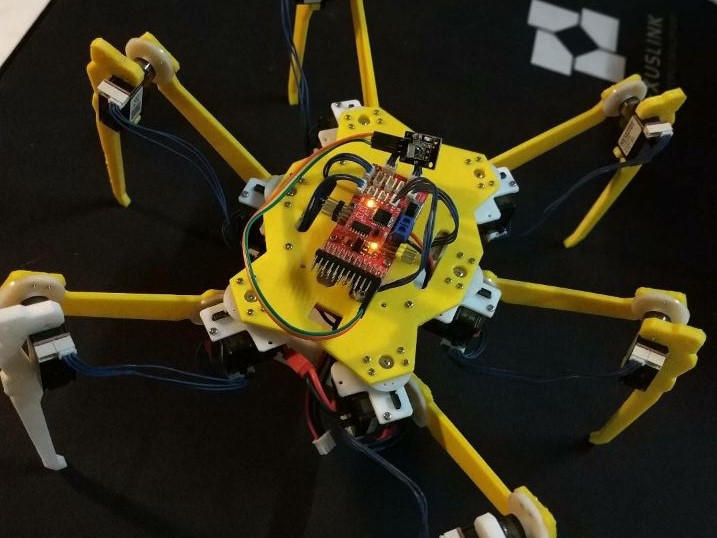
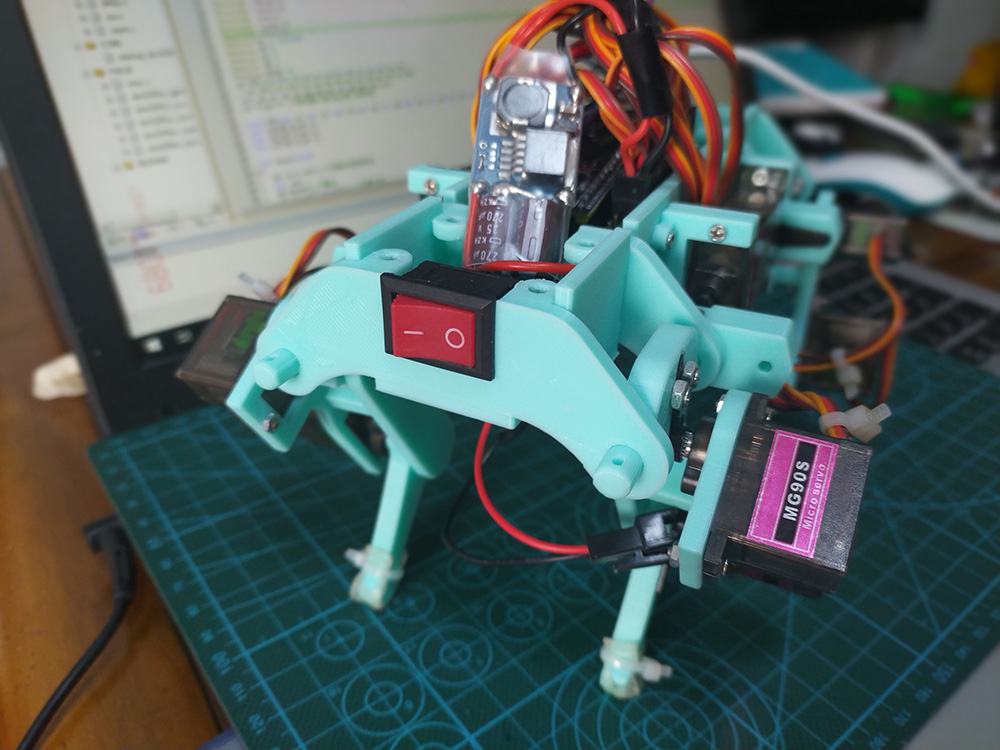


迭代四个版本之后,五连杆构型的12自由度四足机器人“Blacky”最终发布了。源码托管在github上并全部开放,以期望回馈开源社区。目前“Blacky”机器人拥有独立的论坛版块用于技术交流。机器人已经完成运动构型测试,运行性能良好,下一步将开发上层视觉与感知、规划部分。
传感器系统开发结束后,重建机器人开发团队。团队由数理学院、计算机学院、国际学院、通信与信息工程学院、先进制造学院和外国语学院的学生组成,团队成员各有擅长的方向,优势互补。团队开发数个教育用小型机器人在电商平台上出售,募集的资金用于开启更多的研发计划。
开发了一套“分布式有害气体监测系统”,并凭借项目入驻国家级创新创业孵化基地进行孵化。经营“重庆云之岚科技有限公司”(公司现已注销),曾在南部校区教职工家属社区进行过样本为210户的入户运行测试,系统运行良好。公司首年营收3万元人民币,后因学业无法抽身而将公司注销。
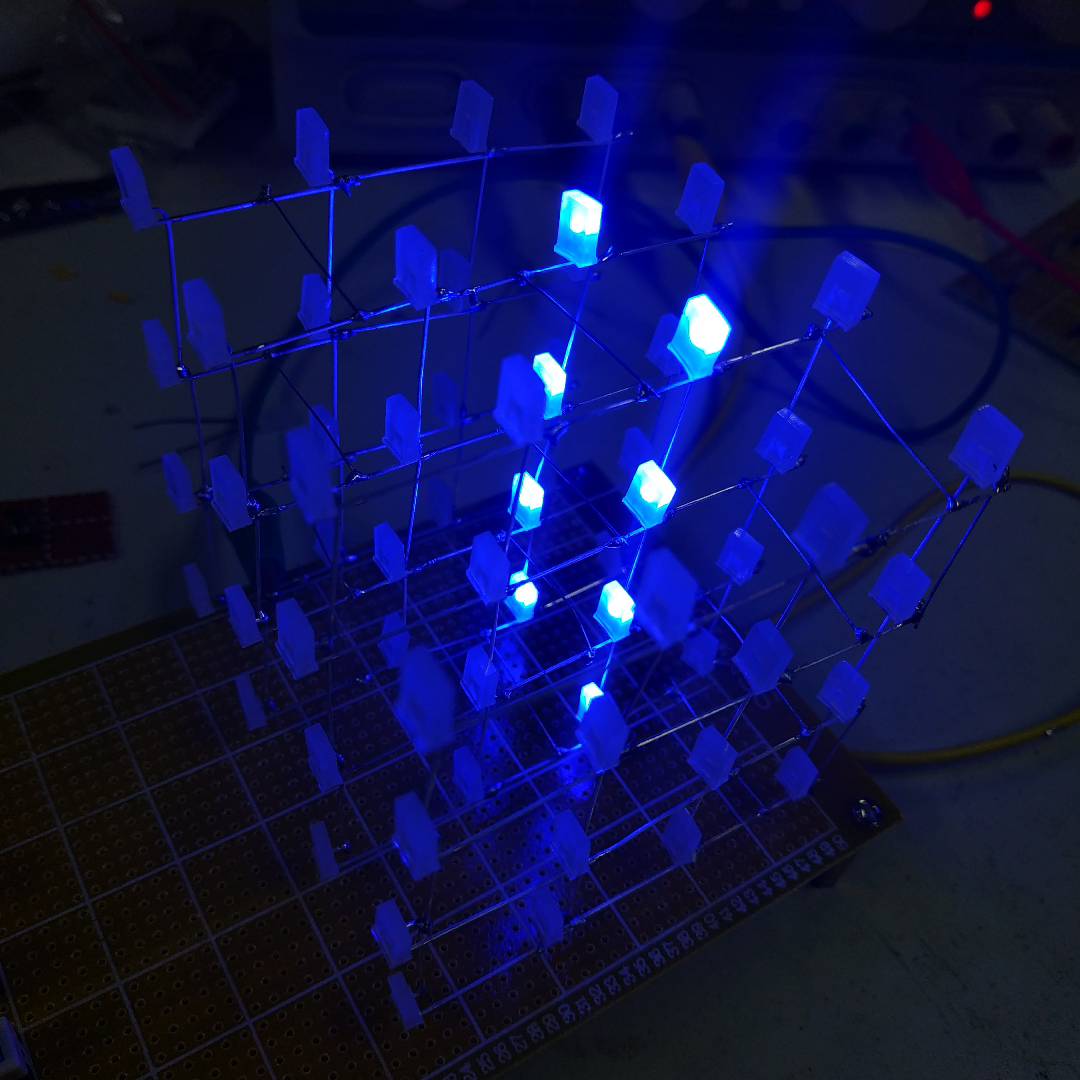
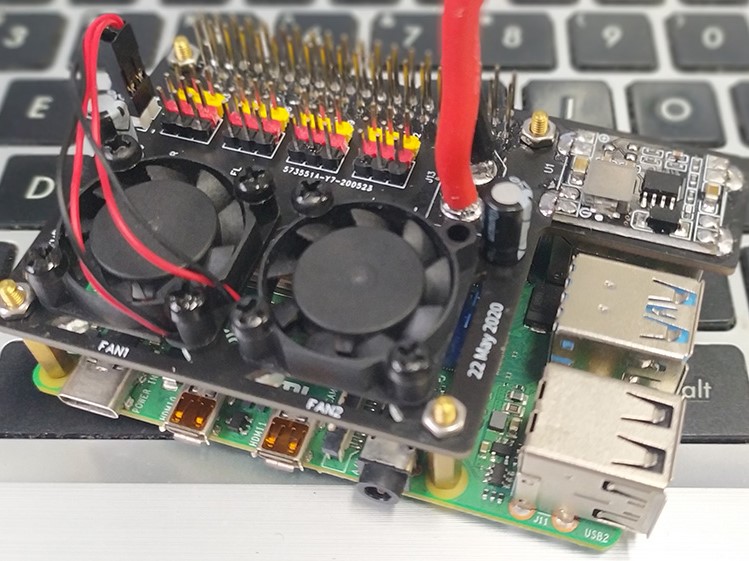
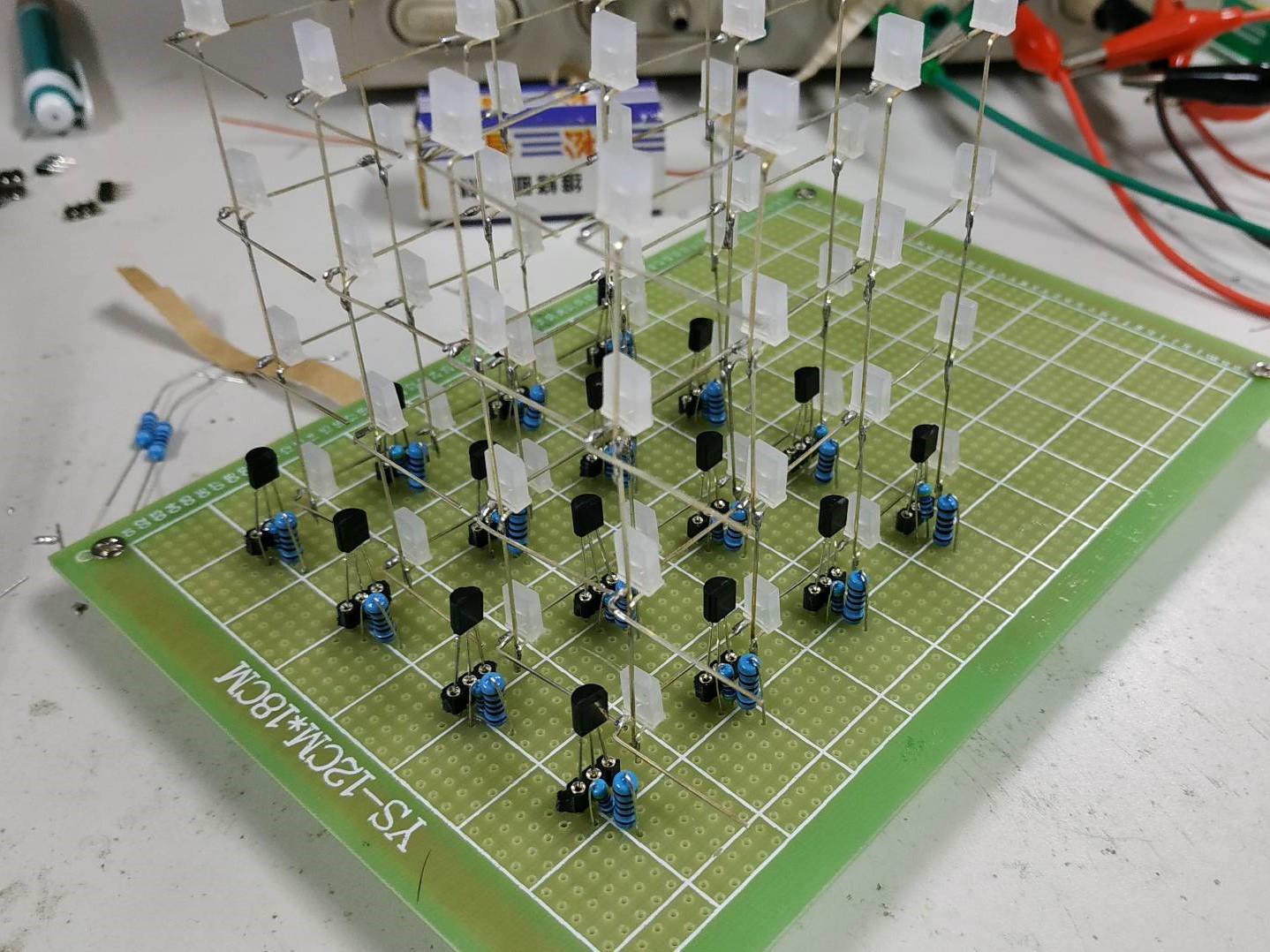
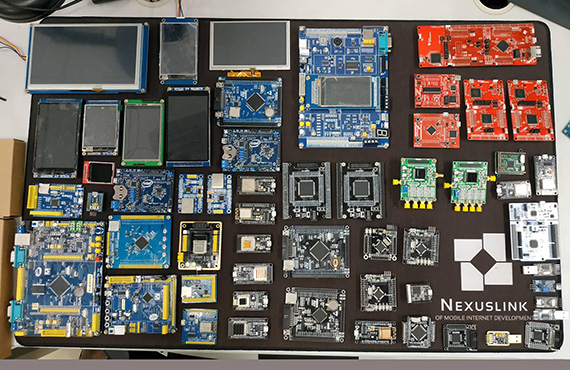
经过3个月的学习、考核和选拔(60进1),我有幸加入了NMID移动互联网工程研究中心,并在硬件平台进行硬件开发。 最初接触了物联网硬件开发和简单的传感器开发,次年开始机器人开发。首次接触大疆无人机也是在这里,体验了大疆的先进技术
首次在校内国家级众创空间接触到智能车开发,简单认识传感器和各种MCU,激起了对硬件的浓厚兴趣,后来也因此选择了加入移动互联网开发实验室。
硬件已经构成了我们生活的基石,一些以前难以想象的技术正在逐渐变现。“足够先进的技术与魔术是无法区分的。” ,对硬件和机器人行业来说更是如此。曾被看作只是航模玩具的无人机已经能够化身为消费级产品进入千家万户,各种先进的技术正从实验室落地,我很幸运,生在了一个技术变革的时代。
爱迪生29岁创办爱迪生实验室,31岁发明电灯;盛田昭夫25岁创办索尼公司;乔布斯21岁创办苹果公司;比尔盖茨21岁创办微软公司;扎克伯格20岁创办Facebook;埃隆·马斯克24岁创办他的第一家公司;马化腾27岁创办腾讯;汪滔读研期间创办大疆。这些热爱科技、敢于冒险、敢于突破、不甘平凡的年轻人创造了曾经的未来,也许下一个变革就在我们手中诞生

这张照片拍摄于中国重庆武隆土坎,在一次支教活动中拍摄。当地政府兴建这样的建筑群来发展旅游业,高空观赏性确实很不错。为了合法在限高高度以上飞行,提前备案了飞行计划,最终拍到许多不错的照片。支教过程中也对孩子们演示了无人机的操作,并在操场上允许孩子们在安全看护下试着操作无人机低空飞行,希望这可以成为一颗种子。
大疆的无人机如此智能,以至于家里的老人都可以操作的很顺畅。外祖父玩过一次无人机后爱不释手,立刻就要加购,他也想看一看自己生活多年的土地在不同视角下又是怎样的景象。

经过1145141919次的尝试,最终做出了还算不错的药膳鸡汤。祖母炖的鸡汤一向是要放很多药膳,莲子,党参,枸杞,沙参,山药,炖出来扑鼻的药香,冬天喝上一碗就直达圆满。而外祖母炖出的鸡汤则什么也不加,最多放几颗枣,文火炖上几个小时,满屋子都是鲜。 这样保持炖鸡鲜美至极的原汁,光是鸡汤泡饭就能吃下几碗。
风格迥异的烹饪口味被我糅合,创造出的属于我自己的口味,或许这也是传承吧。
Copyright © 2020 BlackBox114 - 备案信息 渝ICP备20004025号